Rule Exploration
Comparing Rules and Initial Conditions
Once one simulator works, the interesting question is no longer “can I update the row?” but “what changes when only the local rule changes?” This is where cellular automata become a modeling lab rather than a single example.
Build a reusable simulator
The core function should take three inputs: an initial row, a rule number, and the number of time steps.
def simulate_ca(initial_state, rule_number, steps):
rule_bin = np.array([int(bit) for bit in f"{rule_number:08b}"])
grid = np.zeros((steps, len(initial_state)), dtype=int)
grid[0] = initial_state
for t in range(1, steps):
grid[t] = apply_rule(grid[t - 1], rule_bin)
return gridWith this wrapper in place, changing the experiment only means changing the inputs.
Compare several rules
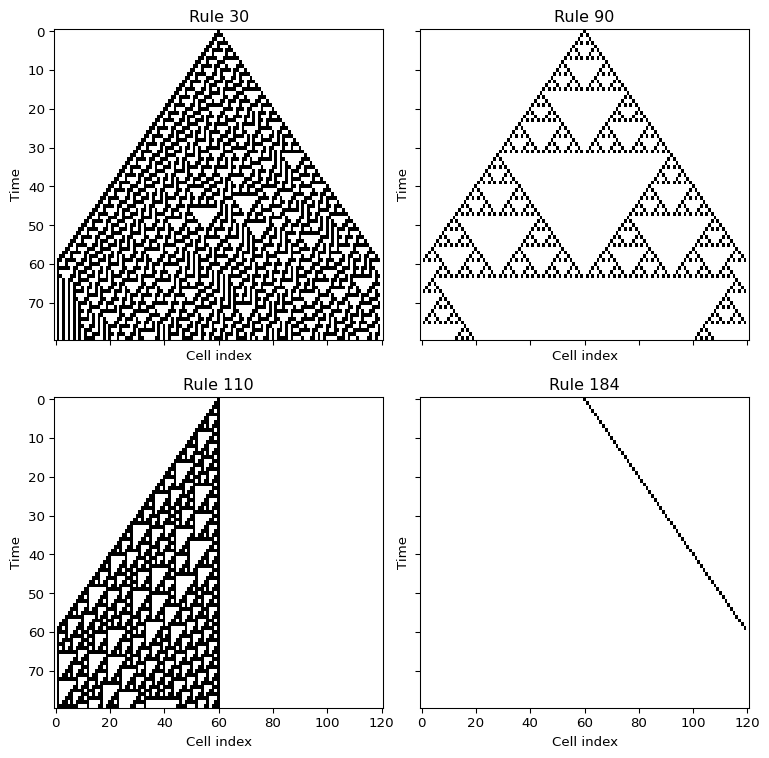
Rules 30, 90, 110, and 184 are a good first comparison because they already show very different behavior.
- Rule 90 creates a highly regular, symmetric pattern.
- Rule 30 quickly becomes irregular and looks almost random.
- Rule 110 shows localized structures and interacting motifs.
- Rule 184 transports occupied sites to the right and is a useful bridge to traffic models.
rules = [30, 90, 110, 184]
for rule_number in rules:
grid = simulate_ca(initial_state, rule_number, steps=80)
plt.figure(figsize=(6, 4))
plt.imshow(grid, cmap="binary", interpolation="nearest", aspect="auto")
plt.title(f"Rule {rule_number}")
plt.xlabel("Cell index")
plt.ylabel("Time")
plt.show()Change the initial condition
The second important experiment is to keep the rule fixed and change only the first row.
rng = np.random.default_rng(7)
initial_state = (rng.random(121) < 0.5).astype(int)
grid = simulate_ca(initial_state, rule_number=110, steps=80)
plt.imshow(grid, cmap="binary", interpolation="nearest", aspect="auto")
plt.show()This lets you separate two effects:
- what is imposed by the rule itself,
- and what is inherited from the initial data.
Optional stochastic extension
If you want to go one step further, add noise after each update. For example, flip each cell with a small probability p_flip.
def noisy_update(state, rule_bin, p_flip=0.01, rng=None):
if rng is None:
rng = np.random.default_rng()
new_state = apply_rule(state, rule_bin)
flips = rng.random(len(new_state)) < p_flip
new_state[flips] = 1 - new_state[flips]
return new_stateThat changes the model from a deterministic rule system into a stochastic one.
Questions for Your Notes
- Which rule preserves symmetry most clearly?
- Which rule seems most sensitive to tiny changes in the first row?
- Which rule looks most like transport or directed motion?
What’s Next?
Rule 184 is already a useful bridge to traffic because occupied cells move to the right under a local exclusion rule. In the next session we keep that traffic intuition, but each car gets its own speed and a random braking rule.